Improve the Control App
That was pretty neat! With just a few lines of MVP code your robot should have picked up on some Fedoras in the vincinity. But we are of course striving for more.
We will enhance the brains … I mean the code of your robot:
We have some improved and more complex code for you do work on. This first part is for finding the hat.
-
It puts the more complex function to find the hat and drive towards it in the function
search_for_hat() -
It uses parameters to easily test, optimize and tune different values in your code
-
It renders the bounding boxes to an Image file, so that you see what the robot sees
Add the new "search_for_hat()" function
Right after the function def start_robot(): add this code (as usual check you identation)
def search_for_hat():
# Define switch for identifying found and intercepted hats across functions
global hat_found_and_intercepted
print('\n### Search For Hat Mode - START ###')
# Circle, capture images, apply model and drive towards an identified object
turn_counter = 0
while thread_event.is_set():
print('\n')
# Take picture and find the object with the highest probabilty of being a hat
objects = take_picture_and_detect_objects()
coordinates = find_highest_score(objects)
# Output distance from sensor
print ('Got distance -> ', distance())
# Check if there is an obstacle ahead
if distance_int() <= min_distance_to_obstacle:
print('### Search For Hat Mode - END: Obstacle detected! ###')
return
# Align to and drive towards identified object
if coordinates and coordinates.confidence_score > config.CONFIDENCE_THRESHOLD:
print(f'''Object with highest score -> [
confidence score: {coordinates.confidence_score},
x upper left corner: {coordinates.x_upper_left},
y upper left corner: {coordinates.y_upper_left},
x lower right corner: {coordinates.x_lower_right},
y lower right corner: {coordinates.y_lower_right},
object class: {coordinates.object_class} ]''')
# Align so that the most likely hat identified is in the center (within 20 pixels)
center_x = (coordinates.x_upper_left + coordinates.x_lower_right) / 2
print(f'center_x: {center_x}')
# Center of hat needs to be within 20 pixels
if abs(image_resolution_x/2-center_x) >= 20:
if center_x < 320:
turn_left(10)
else:
turn_right(10)
# Determine size of the object in the image (not the real size!)
delta = coordinates.x_lower_right - coordinates.x_upper_left
print(f'delta: {delta}')
# Move forward, if size of identified object in image is not big enough
# (i.e. if it's not close enough)
if delta < delta_threshold:
move_forward(10)
else:
hat_found_and_intercepted = True
print('### Search For Hat Mode - END: OJECT FOUND ! ###')
return
else:
# Circle in case no hat could be identied
if turn_counter <= 360:
turn_right(10)
turn_counter = turn_counter + 10
else:
# After a full circle, move forward and circle again to find the hat
move_forward(40)
turn_counter = 0
print('### Search For Hat Mode - END ###')Now, you can call these functions from inside the startRobot() function like so:
# Drop your code here
# Initialize switch for identifying found and intercepted hats across functions
global hat_found_and_intercepted
hat_found_and_intercepted = False
# Main loop running until one hat is properly identified and intercepted (or the app ist stopped)
while thread_event.is_set() and not hat_found_and_intercepted:
# Search for the hat and intercept it
search_for_hat()
log_with_timestamp("Exited main control loop.")Exercise
Your mission: Your robot must autonomously find the red fedora and drive towards it. The mission will count as accomplished when the robot is in front of the fedora.
The playing field where the fedora and robot will be placed is defined inside these boundaries:
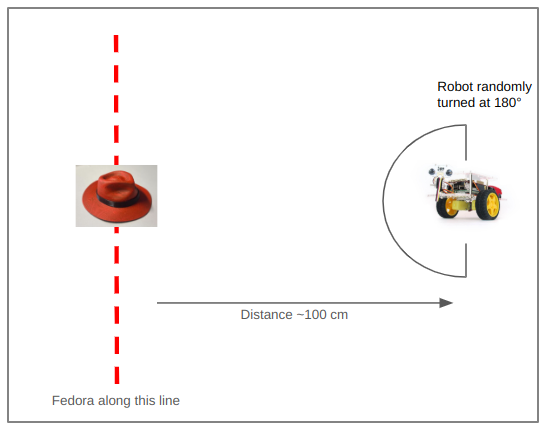
Once you little mechanical friend has completed his mission, you may continue to the next chapter.