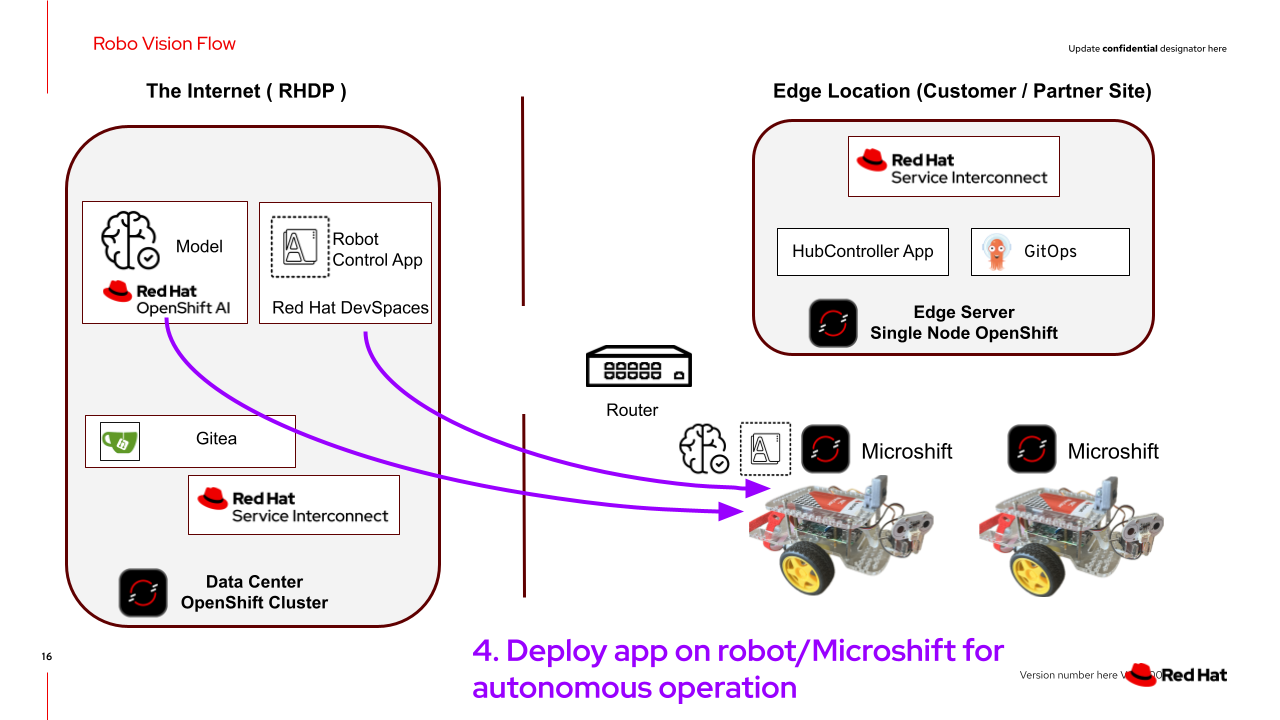
Deploy Control App to the Robot
Testing our solution on OpenShift DevSpaces is fun, but what we really want is an autonomous robot that can think for itself and find our fedora in the most disconnected of places. This means the controll app and the object detection service have to run disconnected on the robot
You will have to provide your solution assets in the form of container images. It is time to move these onto the robot itself.
Build a Container Image of the Object Detection Model
Once we are finished with tuning our object detection model we will package it into a container image to be deployed on the robot.
An OpenShift pipeline based on Tekton has been prepared for you
-
Login into the OpenShift Console with username: team-1 and password : secret-password
-
Go to the the project team-1-ai
-
Click Pipelines on the left
-
Click on the Pipeline
model-image-build -
Click on Actions → Start
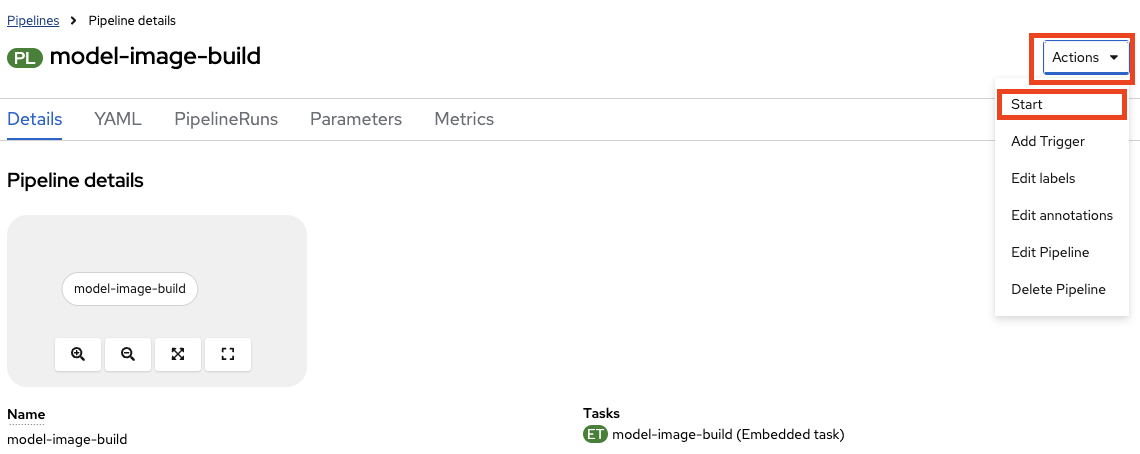
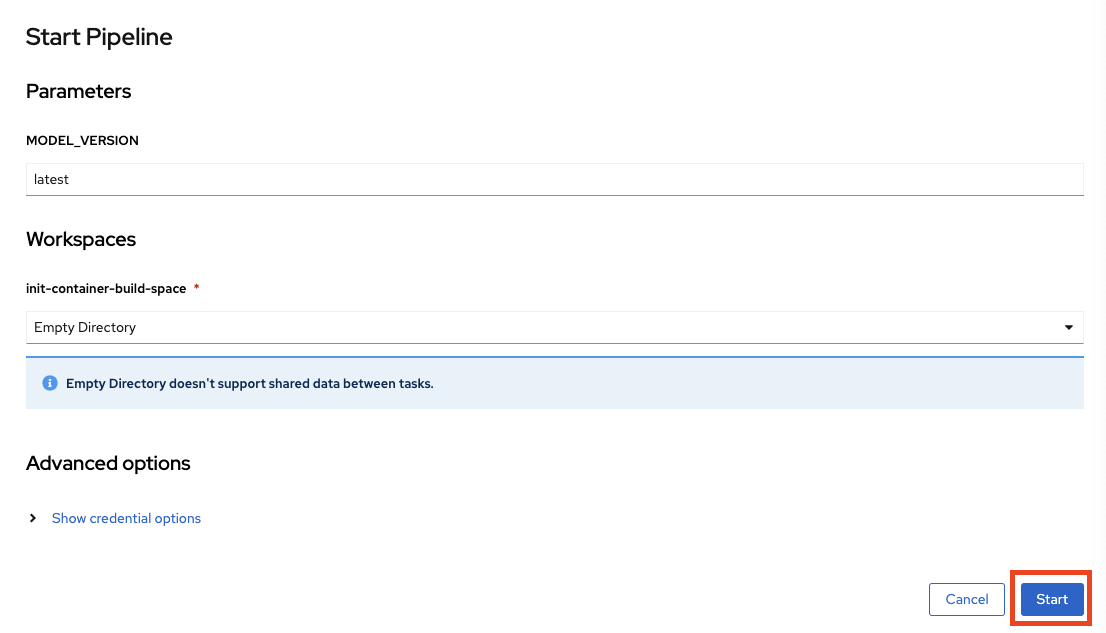
-
Click on Start to start the pipeline
Build a Container Image of the Application
When done with the app we will package it in a Container Image as well.
A matching pipeline has been added to your template app repository. This pipeline is triggered by the creation of a Tag in Gitea. So once you are ready, all you need to do is create a Tag and the Pipeline will build and push the Image to the local OpenShift Registry.
-
Login into Gitea with
-
username:
team-1 -
password :
secret-password
-
-
Select the repository
starter-app-python -
Click on Releases
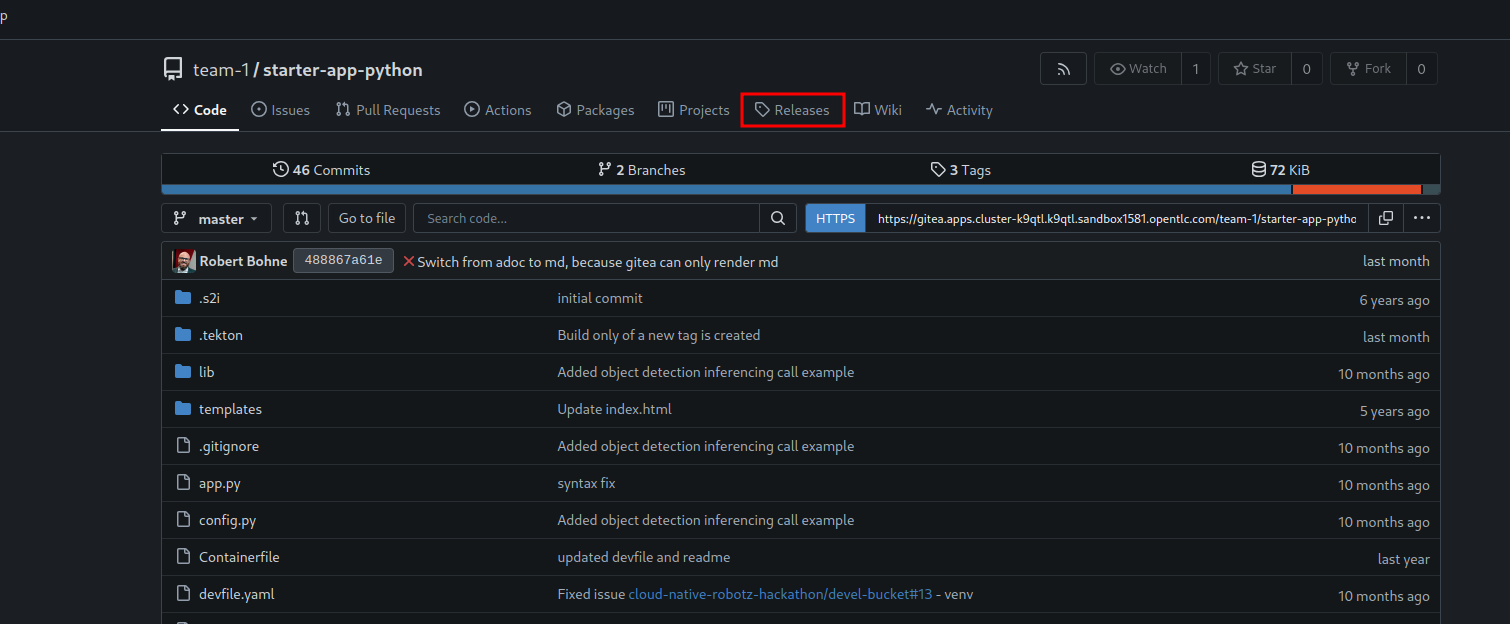
-
Click on New Release
-
Enter the Tag name
v1 -
Click on the button Create Tag Only
Now please open OpenShift Console. You should see you Pipeline running.
If not please, follow:
-
Make sure you are in the Project
team-1-dev -
Click in the Menu in the left: Pipelines → Pipelines
-
And the Tab PipelineRuns
-
Deploy you Images to the Robot with GitOps
Now that we have the images we can deploy them to the robot. Since the robots are running Microshift (a lightweight version of OpenShift) we can use consistent tooling to automate our Deployment. We will use OpenShift GitOps based on ArgoCD for this.
A OpenShift GitOps project has already been setup that listens to changes of a configuration repository. The microshift of your robot as been added as manged cluster so any change in the repo will be rolled out diretcly to your robot. All you need to do is update the configuration code in Gitea.
Have a look at the Git repo : https://gitea.apps.example.com/team-1/robot-gitops
-
The object detection image needs to be set here:
-
-
Click on the pen icon on the top right to edit the file
-
In the resource yaml look for the field
image:with the valuequay.io/cloud-native-robotz-hackathon/model-container:trained -
Replace the value with
default-route-openshift-image-registry.apps.example.com/team-1-ai/model-container:latest -
Click on the Commit Changes Button at the very bottom
-
-
-
The app image needs to be set here:
-
-
Click on the pen icon on the top right to edit the file
-
In the resource yaml look for the field
imagewith the valuequay.io/cloud-native-robotz-hackathon/starter-app-python:master -
Replace the value with
default-route-openshift-image-registry.apps.example.com/team-1-dev/starter-app-python:v1 -
Click on the Commit Changes Button at the very bottom
-
-
| In real world projects, you would use a tool such as Kustomize to add modification layer without changing the actual deployment.yaml files |
Once you commit the changes OpenShift GitOps will start to work on the deployment.
To check the status of the rollout, please check the GitOps Panel / ArgoCD WebUI. It will be displayed on the wall or television.
We understand the steps taken in this chapter are pretty involved. Feel free to discuss what happened with the facilitators.
But the outcome is clear: The control application and the image detection model are running as containers locally on your robot, enabling autonomous robot operations.