Challenge Level 2
Now let’s put the super powers of your robot together and tackle a more challenging mission.
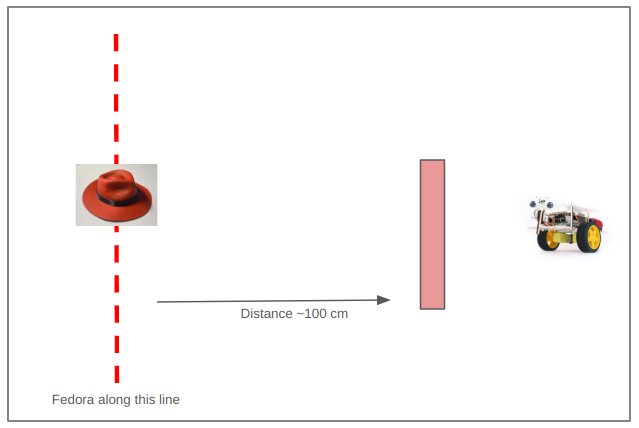
Your mission: Your robot will be positioned in front of a barrier. It needs to drive around it, indentify the red fedora behind it and drive towards it, stopping roughly 20 cm before.
The playing field will look like in the first challenge with a barrier added:
Taking into account the code from you previous missions, develop a solution for this navigation and detection sequence.
Let the facilitators know when you are ready for a run to take the time it takes your robot to arrive at the fedora.